沖壓機械手的工作原理
發布日期:
2020-11-03
瀏覽人氣:
0
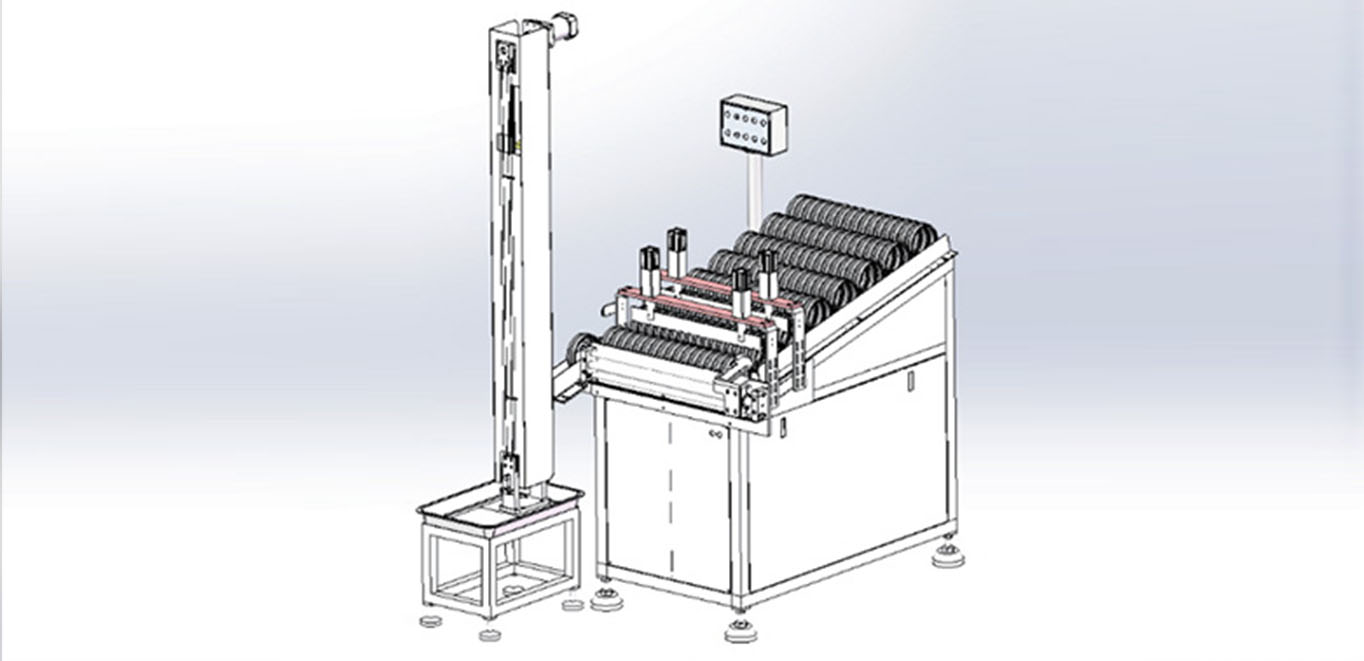
沖壓機械手的一部分被加工成齒條與齒輪嚙合�����。當沖壓機械手伸縮缸人推動活塞桿作往復運動時,齒輪在固定齒條上滾動�����,從而驅動沖壓機械手以桿的兩倍速度作伸縮運動�����。氣缸是一個擺沖壓機械手氣缸��,它推動齒條作往復運動,使齒輪轉動,使整個擺沖壓機械手部分左右擺動。手指的上下運動由手指提升油缸推動。這里,手指是三個氣流負壓吸盤。當吸盤下降并壓在薄板上時,壓縮空氣進入噴嘴�,吸盤即將吸入薄板���;切斷氣源����,薄板將下落�。
當壓力機的滑塊向下移動時,機械手吸料(圖中兩點鏈線所示的狀態)��。吸食后����,手指抬起,手沖壓機械手逆時針方向擺動����,等待喂食�。當滑塊到達底部死點時���,沖壓機械手伸縮油缸移動����,沖壓機械手開始向前伸展��?��;瑝K升起后��,手指將板材放入模具中心位置,將板材放入模具中��,然后手沖壓機械手開始轉動�。縮回���,當一定距離后,擺沖壓機械手油缸開始移動�����,使擺沖壓機械手順時針擺動����,同時繼續縮回。當沖壓機械手完全縮回時���,允許滑塊下降�。當手指到達存儲桶頂部時��,手沖壓機械手停止擺動��,手指伸縮氣缸開始移動,手指降低吸盤,開始下一個循環���。
板材存放在儲料筒內,支撐板可在下方升降。支撐板的升降由皮帶傳動驅動的小電機和蝸輪副帶動絲杠轉動來實現。非接觸式行程開關安裝在儲物筒的上端�����。隨著板材的不斷去除�����,堆垛的高度逐漸降低。當堆垛上平面低于非接觸開關時����,小電機啟動托盤上升�,當堆垛上升到一定高度時�,非接觸開關再次斷電。堆棧停止上升��,因此堆棧的上平面始終處于手指可以到達的高度�����。在儲物筒的上邊緣還安裝了兩塊永磁體�,用同一磁場相互排斥���,使最上層相鄰的塊體相互分離��,避免同時吸兩塊體�����。這種方法只對鐵磁材料有效。